E-mail
du 09 janvier 2008 de Christophe
...
![]() Video décollage 1
Video décollage 1 ![]() Video
décollage 2
Video
décollage 2


Pour le calage de la voilure tentez de connaitre l'angle de portance nulle du profil et ajouter environ 5 ° GR
Bonjour Gérard,
Tout d’abord, félicitations pour votre site des GPR, réguličrement mise ŕ jour et trčs attrayant, une réussite !
Je vous adresse quelques photos, une petite vidéo et des indications concernant mon chariot de décollage pour grande plume. La mise au point de ce systčme a été assez galčre !! Pourtant aprčs de multiples recherches sur le net (les Allemands utilisent souvent ce systčme) et de longs mois de mise au point sur plusieurs types de revętements, je suis parvenu ŕ finaliser cette " version 4 " du chariot. Voici en vrac quelques indications pour la construction du chariot et des conseils suite aux multiples essais :
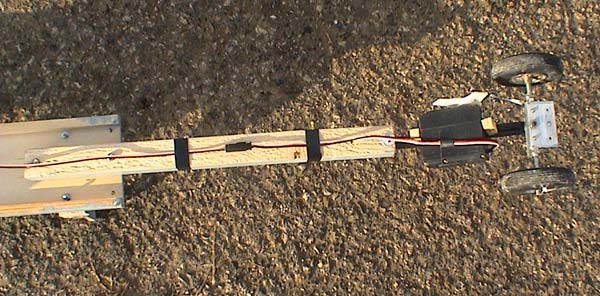
- Le plateau principal (650 X 100 mm) est en contreplaqué 50/10čme renforcé par 2 baguettes en bois dur de 10 mm X 10 mm.
- Le train principal en dural est équipé de deux roues en plastique de diamčtre 150 mm, genre roue de jardinerie (tondeuse, scarificateur...)
- Un tasseau (longueur 400 mm) de section 30 X 20 mm prolonge le plateau et reçoit le train arričre orientable sur lequel une pičce en alu pivote équipée de deux roues avion de diamčtre 75 mm.
- Un servo ŕ fort couple pilote les roues directrices, un petit récepteur (męme fréquence que le planeur, voie de la direction !) et un petit accu sont fixés sous le plateau avec du velcro.
- Une goupille (4 mm de diamčtre) dépasse du plateau d'une quinzaine de mm et rentre dans un petit tube alu fixé dans le fuselage (jeu d’environ 1mm). C'est la liaison entre le planeur et le chariot.
- Deux couples en CTP maintiennent le fuselage en bonne position horizontale.
1) En pratique la voie du train avant (écartement des roues) doit ętre la plus grande possible ainsi que la distance entre les roues avant et arričre. Cela conditionne la stabilité et le roulage droit de l’ensemble.
2) Le calage de l'aile par rapport ŕ la référence au sol est d'environ 5 ŕ 7 degrés maxi. Attention au faux départ aux grands angles ŕ faible vitesse et il vaut mieux en rester ŕ 5 degrés si le planeur décroche facilement.
3) Le systčme de dirigeabilité n'est peut ętre pas indispensable, mais je le recommande car il permet de corriger la trajectoire de l'équipage pendant la phase de décollage (prévoir un faible débattement). Cela est pratique s'il y a du vent, en fonction de la puissance moteur, du revętement du sol, etc...
4) Le décollage survient tout seul dčs que le planeur atteint une vitesse suffisante. Actuellement, je parviens ŕ décoller sur 10 - 15m avec mon Ventus de 4,50m et 6,5kg sur une petite route en mettant un peu de volets de courbure.
5) Il doit ętre possible de décoller d'une bonne piste en herbe, je dois encore mettre au point cette technique. Attention cependant sur les mauvais revętements, les rebonds peuvent provoquer un décollage prématuré et le planeur retombe sur son hélice qui se brise bien entendu (expérience vécue !!!).
6) Pour la puissance de la motorisation électrique, ne pas lésiner et prévoir 200 watts par kilo. Cette puissance donne de la sécurité pour l’accélération et le décollage.
Cette technique est intéressante pour l'envol des grands planeurs et l’énorme avantage de ce systčme est qu’il permet d'ętre complčtement autonome en plaine.
Je souhaite éventuellement discuter de ce systčme avec d’autres modélistes pour l’améliorer encore. Je dois prochainement expérimenter cette technique sur un Nimbus de 6 mčtres.
Bien Sincčrement.
Christophe BELLIER
Tél : 0326472798
Email : chris.bellier@orange.fr

Le berceau principal et le doigt de verrouillage
Le servo de direction avec faible débattement des roues

Oui attention aux revętemnts non aménagés ...

Il est de loin préférable d'utiliser un chariot perfectible plutôt qu'un lancé-main par un aide de passage...
Ce sujet intéresse de nombreux modélistes isolés mais pas seulement, car il s'agit d'un problčme de sécurité. J'actualiserai volontiers cette page pour que tout le monde puisse bénéficier du retour d'expérience des expérimentateurs. Alors n'hésitez pas ŕ communiquer avec Christophe sur le sujet GR