le Dynamic Soaring et ses dérivés...
![]()
![]()
|
le Dynamic Soaring et ses dérivés... |
||
|
|
|
|
|
|
|
|
Vidéo montrant l'Alpilles dans les mains de Ludo lors d'une séance "soft" selon lui de "Dynamic Soaring" et cela au-dessus d'une prairie mais en bordure d'une pente. Un bel exemple pour démontrer que cette pratique n'exige pas un site particulier comme voler sous le vent d'un relief. Autre possibilité d'avoir un gradient de vent suffisamment important et jamais utilisé à ma connaissance : les contours d'un puissant thermique bien organisé. Mais ici la direction de l'écoulement général n'est plus horizontale mais verticale. Je vous explique comment j'ai fait cette découverte lors d'un vol en montagne en Suisse en 2003. GR |
Très explicite présentation du DS avec l'albatros et l'ash25... |
|
|
|
|
Conférencier: Spencer Lisenby - développeur de prototype chez DSKinetic Abstract La plupart des gens n'imagineraient pas que l'avion radiocommandé le plus rapide au monde n'a pas d'hélice, de réacteur ou de source de propulsion à bord. Le "Dynamic Soaring" est une méthode unique de montée en flèche qui a permis aux planeurs radiocommandés d'atteindre des vitesses supérieures à 835 km/h. Nous explorerons les principes fondamentaux et les progrès de l'envolée dynamique et examinerons les défis associés à la conception, la construction et le pilotage d'un modèle d'avion non motorisé à des vitesses comparables à celles des avions de ligne modernes. Nous réfléchirons également à des applications pratiques de ce type de vol et discuterons de la possibilité de l'appliquer à l'avenir. Spencer Lisenby est diplômé de l'Université Vanderbilt avec un B.S. en génie mécanique et réside actuellement et chasse le vent dans le sud de la Californie. Il a établi le record du monde de vitesse pour les planeurs radiocommandés 14 fois et détient le record actuel de 519 mph (835 km / h) avec son 130 "Kinetic DP (www.DSKinetic.com). Enregistré lors du Big Techday 10 de TNG Technology Consulting GmbH / http://www.tngtech.com le 2 juin 2017 à Munich / Allemagne |
|
|
|
|
|
Le vol de gradient (ou Dynamic soaring) est une technique de vol utilisée pour gagner de l'énergie en traversant de manière répétitive la limite entre deux masses d'air ayant des vitesses distinctes. De telles zones de gradient significatif de la vitesse de vent se trouvent soit près du sol ou dans une zone protégée par un obstacle comme à l'arrière d'une colline. Par conséquent cette technique est utilisée principalement par les oiseaux ou des planeurs radio-commandés. Toutefois, des pilotes de planeur comme Ingo Renner ont pu l'utiliser. La vitesse maximale rapportée par des pilotes de planeur radio-commandés est de 500 milles/heure soit environ 800 km/h. Le vol de gradient est parfois confondu avec le vol de pente. Dans ce dernier cas, le pilote vole légèrement en amont de la colline et utilise la déflexion verticale du vent. |
Plusieurs types de trajectoires peuvent être utilisés en vol de gradient. Le mécanisme le plus simple est une boucle verticale à travers les deux masses d'air en mouvement relatif. Le gain en vitesse durant une boucle s'explique par le fait que lorsque le planeur passe d'une masse d'air à une autre, sa vitesse sol reste pratiquement constante car le référentiel Terre est pratiquement galiléen. Laccroissement de la vitesse peut être expliqué soit en termes de vitesse air ou vitesse sol. Le gain en vitesse est approximativement 2 fois la différence de vitesses entre les couches supérieure et inférieure. La trajectoire idéale est montrée dans l'animation ci-dessous et est décrite en détail dans la boîte déroulante. |
|
|
|
|
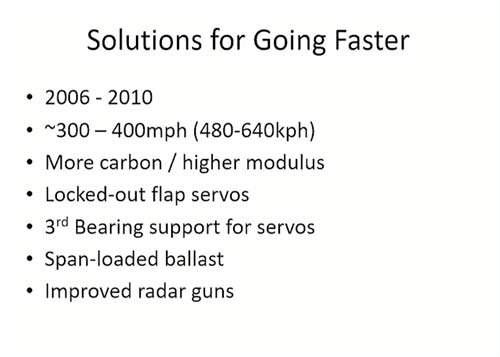
Solutions pour voler plus vite...
|
|
|
|
|
|
3eme palier pour servos |
|
|
|
|
|
|
Clic pour rejoindre le site de CRRC |
|
|
|
|
la liste de records en matière de DS... Clic sur l'image pour rejoindre le site |
|
|
Planeur radio-commandé À la fin de la décennie 1990, les utilisateurs de planeurs radio commandés eurent l'idée de pratiquer le vol de gradient à la suite d'une idée de génie de Joe Wurts. Les pilotes de planeurs radio commandés effectuent les vols de gradient sous le vent d'obstacles au sol comme des arêtes de collines, des falaises, etc. Ces obstacles peuvent soit arrêter le vent complètement ou même l'inverser localement. Le gradient de vitesse du vent peut être beaucoup plus grand que le gradient utilisé par les oiseaux ou les planeurs de taille normale. Par conséquent la quantité d'énergie extraite peut être accrue, nonobstant les charges alaires plus élevées subies à la limite de la zone au vent et de la zone protégée. En raison de ces charges élevées, les planeurs radio commandés sont construits en matériaux composites. Le record a été établi en 2015 par le pilote Spencer Lisenby avec une vitesse maximale de 826 km/h (513 mph) mesurée par radar portable. Le planeur était un Kinetic 130 (3,3m d'envergure). Le précédent détenteur du record en 2014 à 505 mph (Bruce Tebo) avait aussi utilisé un Kinetic 130 lesté de 12kg, dans un vent d'environ 90 km/h et des rafales à 105 km/h Une règle empirique dit que la vitesse maximale que peut atteindre un planeur radiocommandé est égale à 10 fois la vitesse du vent. |
|
|
Dynamic Thermal ...? |
|
|
|
|
|
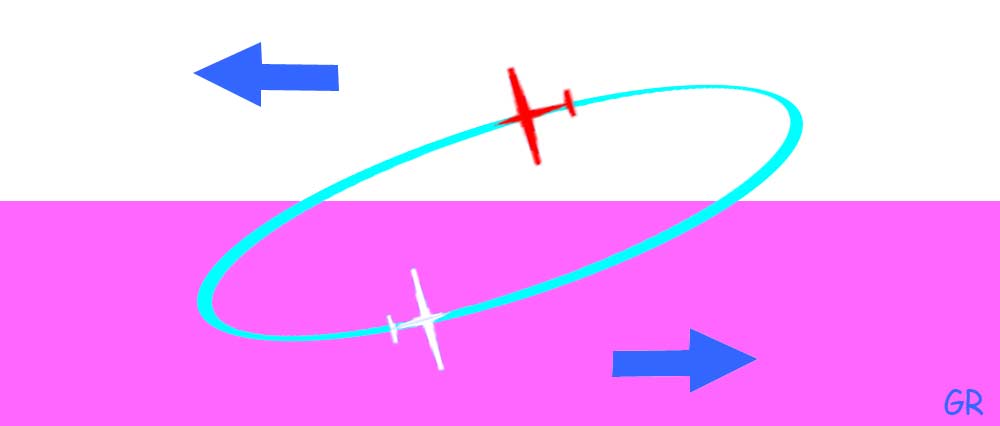
Voici deux masses d'air à écoulement opposé à fort gradient: le cas le plus fréquent pour explorer les possibilités du Dynamic Soaring. Et la trajectoire du planeur évoluant entre ces deux masses d'air. Jusque là je ne fais que répéter ce qui a été dit plus haut. Oui mais voilà, prenez cette même image et tournez là de 90° dans le sens horaire ... |
|
|
|
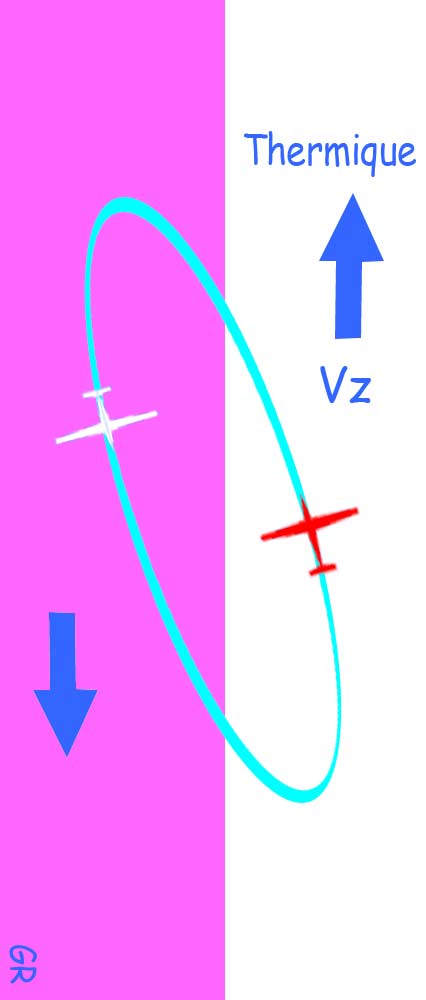
Vous obtenez ceci : Vous remarquerez que toutes les conditions sont respectées excepté la référence horizon. La référence horizon n'intervient jamais dans le phénomène. Seule nous intéresse cette zone de friction qu'elle soit horizontale, inclinée ou bien verticale. Si j'ai mis du temps à faire le rapprochement entre une méthode que j'utilisais avec bonheur - en particulier avec mon DG 400, c'est tout simplement par ignorance du phénomène " Dynamic Soaring". La génèse... Première étape : J'avais remarqué à l'époque où je pratiquais le vol à voile assidûment et en particulier lors de vol en montagne, qu'il n'était pas facile de pénétrer dans un thermique puissant et souvent étroit sans se faire éjecter. Je vous parle d'une époque très lointaine alors que je volais sur N2000 en particulier à Vinon. Bref, je m'étais dit : " les autres y parviennent et n'en parle jamais et moi je me fais éjecter...". Pas content de cette situation et un peu habitué malgré tout à voler dans l'air turbulent des Alpilles, je n'ai vu qu'une solution : pénétrer dans le thermique en ayant emmagasiner de l'énergie cinétique tout en sachant que j'allais me faire secouer. Pour cela après mettre fait éjecter une première fois en vol normal, je revenais à la charge en prenant de la vitesse (piqué dans la zone descendante qui entoure le thermique) et une fois dans le thermique je cabrais et ça montait de façon spectaculaire, voire inquiétante pour le jeune vélivole que j'étais. Bref, c'est une technique que j'avais mis au point - tout seul dans mon coin - sans en parler à personne à une époque où Internet n'existait pas. Et elle est restée très longtemps en sommeil. Naturellement je ne dois pas être le seul à avoir exploité cette façon de faire. Il faut aussi rappeler qu'à cette époque les secrets, les méthodes, les techniques étaient peu partagées jusqu'à l'arrivée du Web dans les chaumières. Seconde étape : le planeur Rc : Comme il se doit, lorsque l'on pratique - en plus, le planeur Rc on reproduit, ou l'on tente de reproduire, sa façon de piloter acquise avec le planeur grandeur. Inévitablement je me suis trouvé confronté à ces méchants thermiques puissants et étroits en vol de pente et plus particulièrement en VTR (vol thermique de relief). Et pendant des années après avoir repéré la présence d'un thermique, je m'éloignais de lui puis je plongeais dans sa direction. Parvenu dans la zone du thermique, je cabrais en décrivant une spirale ascendante jusqu'à avoir épuisé toute l'énergie cinétique. Je considérais - à l'époque avec mes connaissances de la mécanique du vol - qu'il n'était pas possible de parvenir plus haut que mon point de départ malgré la présence de l'ascendance, bien que - visuellement - j'étais troublé par ce que je voyais. : la télémesure n'existait pas. <<<<suite |
|
Puis un jour (été 2003) - en Suisse, lors d'une séance de vol de pente, un ami - Gérard, me demanda de remonter son planeur qui était très bas. C'était je crois le Flamingo de Multiplex. Marcel mon inséparable compagnon de jeu était lui aussi très bas et au même niveau. Me voilà donc confronté à une enième remontées du trou avec la condition implicite de ne pas décevoir. J'avais repéré la présence du thermique lorsque Gérard pilotait sans qu'il ne parvienne à l'enrouler car il volait trop lentement espérant ainsi ne pas descendre plus bas. Marcel sur notre droite en avait trouvé un - plus faible certes, mais qui lui convenait et je ne voulais pas lui compliquer la vie en volant à deux dans le même thermique. Bref, j'ai donc décidé de jouer ma dernière carte pour ne pas me faire éjecter: plongeon donc vers le thermique ce qui ne faisait qu'accroître la descente du planeur dans le trou. Puis ressource une fois au cur du thermique, magnifique trajectoire de toute beauté et j'ai remis ça - trois fois de suite - pour parvenir à mettre en seulement trois plongeons le planeur sur l'horizon, soit une ascension d'environ 180 à 200m. Pendant ce temps le grand Marcel enroulait avec un calme olympien sa pompe. Et il ne voulu pas changer lorsque je lui proposais de venir utiliser ce super thermique. J'hésite à vous dire comment Gérard a commenté cet épisode... Jusqu'à aujourd'hui, me dit-il, j'avais des doutes sur ce que je lisais dans les revues spécialisées (sans en citer aucune, ni le nom du pigiste), mais après ce que j'ai vu aujourd'hui, j'avoue que dorénavant je serais moins incrédule. Je vous passe sous silence la suite. Bref, le Gérard était épaté certes, mais moi aussi ! Cette histoire je n'ai pu l'oublier car ce n'était pas le résultat d'un quelconque talent de pilote, mais de quelque chose de plus mystérieux. J'ai donc mis beaucoup de temps à tenter d'élucider ce mystère. Et comme notre brave homme, monsieur Jourdin...<< Par ma foi ! il y a plus de quarante ans que je dis de la prose sans que jen susse rien... >>. J'ai confié - il y a quelques années avec l'arrivée du Web, cette histoire à Matthieu Scherrer qui m'avoua que mes supputations étaient plausibles car j'évoluais dans les mêmes conditions du DS. Rien n'étonnait Matthieu et nous en sommes restés là. Mais voilà, durant des années je n'ai jamais rien lu de tel sur le web, et comme il est impossible de tout lire, peut-être pourrez-vous m'aider et ainsi me rassurer en me proposant des articles traitant de ce sujet particulier pour vérifier mes élucubrations. suite >>>> |
Pour conclure... Je ne sais pas comment baptiser ce type de vol pour exploiter un thermique, mais ce qui est sûr c'est qu'il faut entretenir le mouvement qui ira en s'accélérant ainsi que les gains d'altitude qui l'accompagne à chaque tour, car dans le cas présent, on conserve les conditions du vol tout en montant ce qui n'est pas du tout le cas lorsque l'on utilise un gradient déclenché par un relief. Toutefois contrairement au DS de "relief", le but de la méthode est très différent. Dans le premier cas on accumule l'énergie pour accroître constamment la vitesse et ainsi battre des records, dans le deuxième cas l'excédent d'énergie acquise est en partie utilisée pour monter le plus rapidement possible en ayant conscience que la gravité, la traînée - où que nous soyons, est toujours là et qu'il y a un prix à payer. L'erreur que je commettais était donc de m'arrêter après le premier "run" car parvenu à une hauteur que j'estimais satisfaisante et l'affaire en restait là. Il faut donc lancer le processus en conservant le même protocole et cela jusqu'à la VNE ou plutôt s'arrêter un peu avant ! Dernier point, nul besoin d'aller en montagne, ces conditions de gradient on peut les rencontrer en plaine les jours de forte instabilité et également lors d'entrées maritimes dans la zone de cisaillement. Quant à atteindre les 850 km/h j'ai passé l'âge... mais quelle surprenante performance tout de même quand on pense qu'il n'y a aucun moteur. Existe-t-il d'autres phénomènes tout aussi extravagants à découvrir ? Probablement et c'est ce qui fait le charme de notre passion. Dernier point... Concernant le vol à voile, cette technique n'est surtout pas à recommander pour deux raisons : les machines ne sont pas étudiées pour subir de tels facteurs de charge ainsi que les gouvernes et d'autre part pour les risques de collision lors des changements brutaux de niveaux et cela à grande vitesse. GR
|
|
|
|
|
le "25" de Marcel en 2003 du côté des Diablerets |
|
|
|