Sécurité alimentation des GPR....
![]()
![]()
|
Sécurité alimentation des GPR.... |
||
|
|
|
|
|
E-mail de Louis du 29 février 2012
Bonjour Gérard, Excellente idée que cette rubrique "alimentation", qui est un vrai sujet pour les planeuristes. Pour ce qui me concerne, je suis en 41Mhz. Comme accu, j'utiliserai des Nimh. Pour le récepteur, 2 packs faits avec des éléments de 800 mA au format AAA (petites piles bâton) que je trouve dans le commerce. Pour les servos, toujours Nimh : 2 accus de 5 éléments régulés chacun par une diode chottky au format 2/3 pour une capacité de 2 ampčres. Louis Louis il faut que tu saches qu'il y a beaucoup de modélistes déçus par le NimH. Et j'en fais parti ! Pas plus tard qu'hier, j'ai du remplacer un pack sur le DG 400 car la tension montait trčs au-delŕ de la normale...Et ŕ la lecture du chargeur, la mienne aussi ! J'ai le sentiment que beaucoup de chargeurs ne font pas correctement leur travail et de ce fait endommagent les éléments. Bref j'arręte lŕ mes remarques pour laisser la place ŕ ceux désirant s'exprimer sur le sujet et plus compétents que moi. GR
|
E-mail de Christophe du 28 février 2012 Bonjour Gérard, J’ai parcouru avec attention le descriptif de Louis pour alimenter ses 11 servos. Quel type d’accus va-t-il utiliser ? Car en fonction il faut des dispositifs de régulation, j’imagine qu’il va prendre des Lipo car moins encombrants et plus de capacité pour un poids équivalent. Aussi : Va-t-il utiliser le 2.4 ou bien une réception standard, 41 ou 72 ? (41 et 72 c'était du standard !) S’il prend le 2.4, il faut ajouter des condensateurs sur la platine de distribution. N’étant pas spécialiste, je n’expliquerais pas pourquoi mais c’est ce que conseillent les "pro" de l’électronique. (Le 2.4 n'aime pas les micro-coupures et donc les condos viennent combler les éventuelles brčves défaillances d'alimentation. GR) Aussi il serait intéressant d’avoir une page dédiée aux systčmes d’alimentation et répartition de courants car c’est un dispositif primordial pour la fiabilité de nos machines. (Bon trčs bien je vais ajouter ce chapitre aux GPR, mais j'aurais besoin d'experts ! GR ) De plus tous ne pouvons acquérir des systčmes tout intégré aux performances certes excellentes mais aux prix exorbitants ! (C'est vrai, c'est pas donné !) Pour ma part, je préfčre avoir deux systčmes séparés qu’un seul tout intégré, mais cela reste une question de point de vue. Ça fait du travail, j’en suis conscient et on l’use notre serviteur, mais que veux-tu, tu es extraordinaire ! ( C'est la premičre fois que j'entends une chose pareille, comme quoi - tout peut arriver dans la vie !) Bien amicalement. Christophe. |
|
E-mail du 1 mars 2012 en provenance de Normandie Bonjour Gérard, Sur tous mes modčles j'alimente de la męme maničre depuis plusieurs
années sans aucun problčme.
|
|
|
Bonjour Gérard, |
|
|
n°1 :
pour le répartiteur, il faut acheter de la "plaque d'essai", au pas de
2,54 mm chez n'importe quel revendeur de matériel électronique. La
premičre opération consiste ŕ faire venir du répcepteur sur le
répartiteur le signal pour chaque servo avec la masse, pour éviter les
"boucles radios". |
|
|
|
|
|
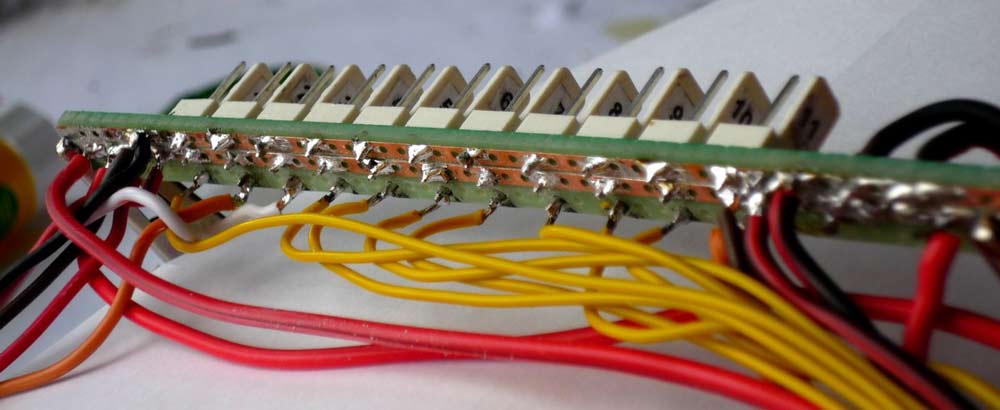
n° 2 :
Lŕ on le voit, il faut manier le fer ŕ souder. Chaque accu du circuit
"puissance" vient allimenter le répartiteur en une de ses deux
extrémités. D'aprčs ce que j'ai compris, cela évite de "surcharger" le
circuit imprimé de la plaque, qui ne supporte pour chacune de ses
parties que la moitié du courant total utilisé, lorsque tous les servos
sont actionnés en męme temps. |
|
|
|
|
|
n° 3 : J'ai ensuite recouvert les soudures de résine, pour qu'elles ne bougent
pas lors d'un choc éventuel. Ensuite, j'ai mis cela dans de la gaine
thermo. Le renflement ŕ droite correspond aux ferrites ŕ l'interieur
desquelles passent les fils. |
n° 4 : |
|
|
|